Altitude Hold Proving Dangerous Discussions diydrones
Apm 2.6 loiter hot sale tuning
Share.
Visit »

APM 2.5 In Flight Pitch Roll Gain Tuning for Stabilize Mode w TBS 
APM 2.52 Flight Controller Board Geeetech Wiki 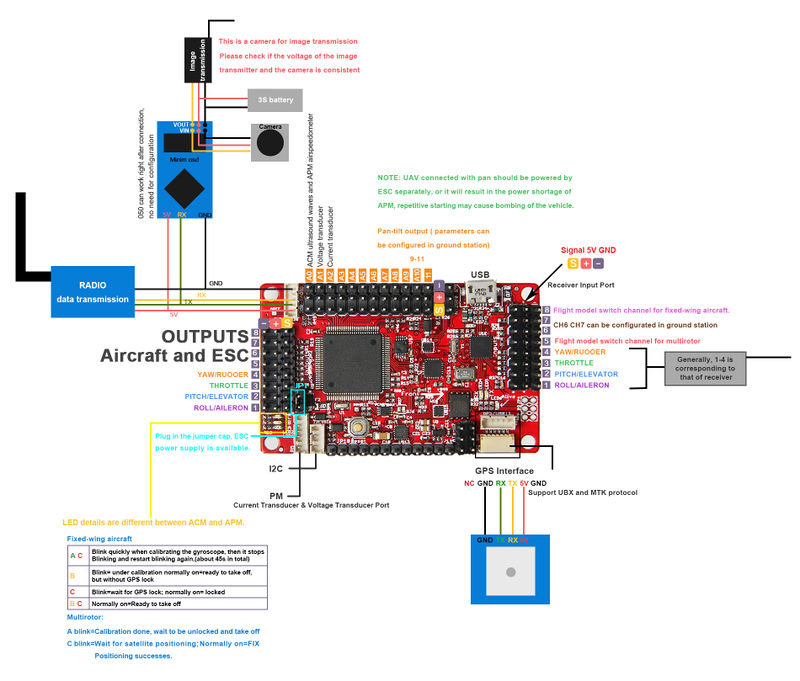
APM 2.52 Flight Controller Board Geeetech Wiki 
APM 2.6 Loiter Mode Copter 3.1 ArduPilot Discourse 
APM 2.6 configuration step by step for fixed wing missing compass calibration 
Loiter Mode Copter documentation 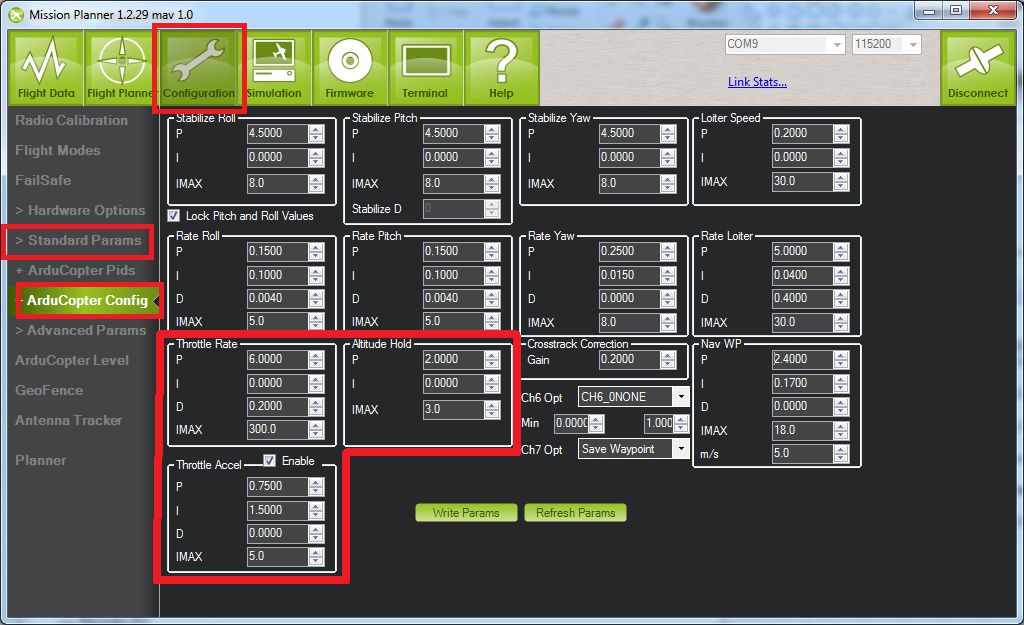
Arduino based Arducopter UAV the open source multi rotor 
4 8 APM 2.5 2.6 3.1 Introduction to flight modes stabilize loiter RTL etc 
Can we fly quadcopter using ardupilot or APM 2.5.2 without using 
APM 2.5 Flight modes Stabilise Altitude hold and Loiter Tabrez Nadvi 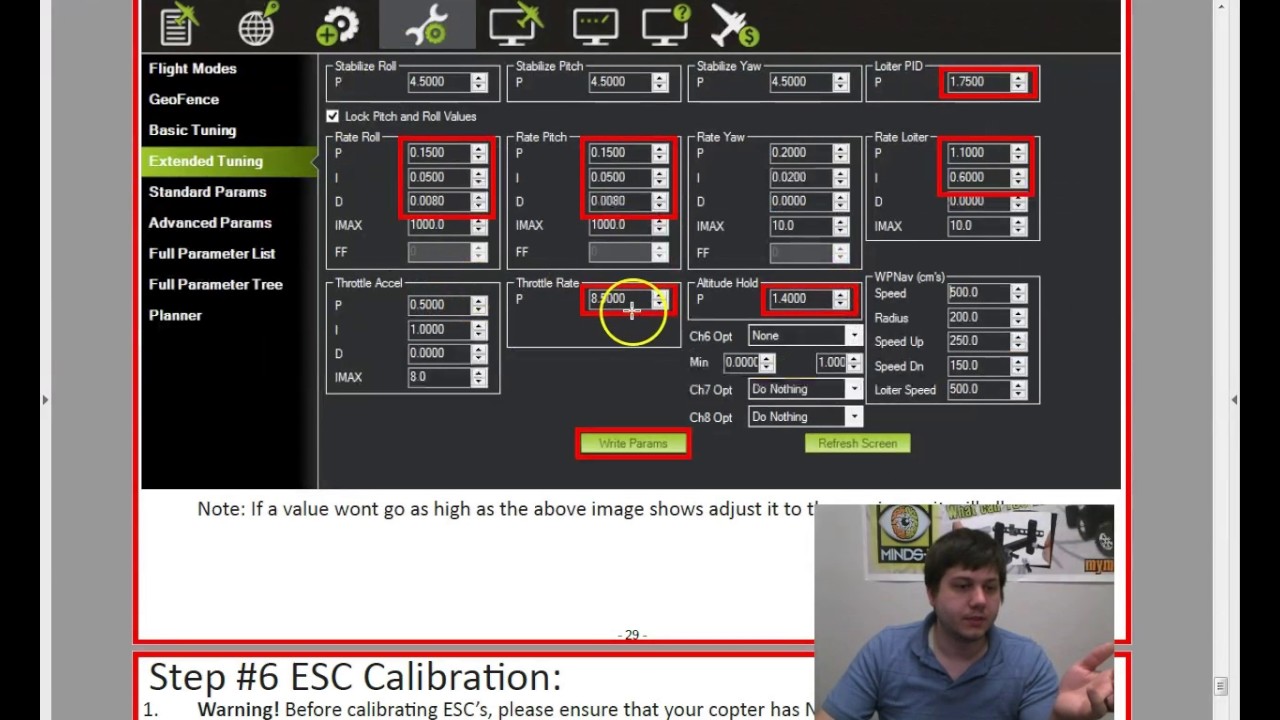
MINDS i Mission Planner Step 5 PID Tuning 
esc calibration airhigh 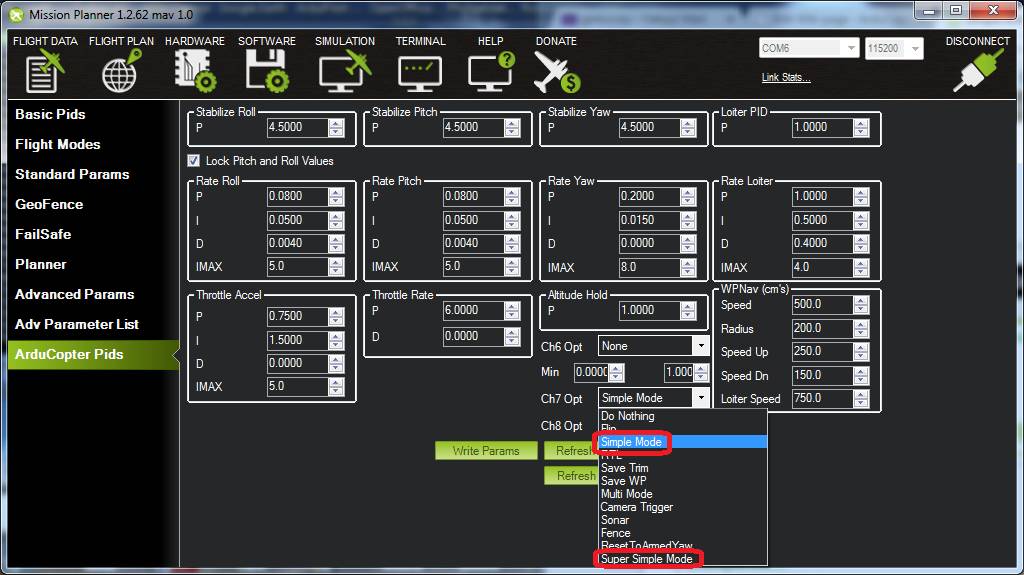
Auxiliary Function Switches 3.6 and earlier Copter documentation 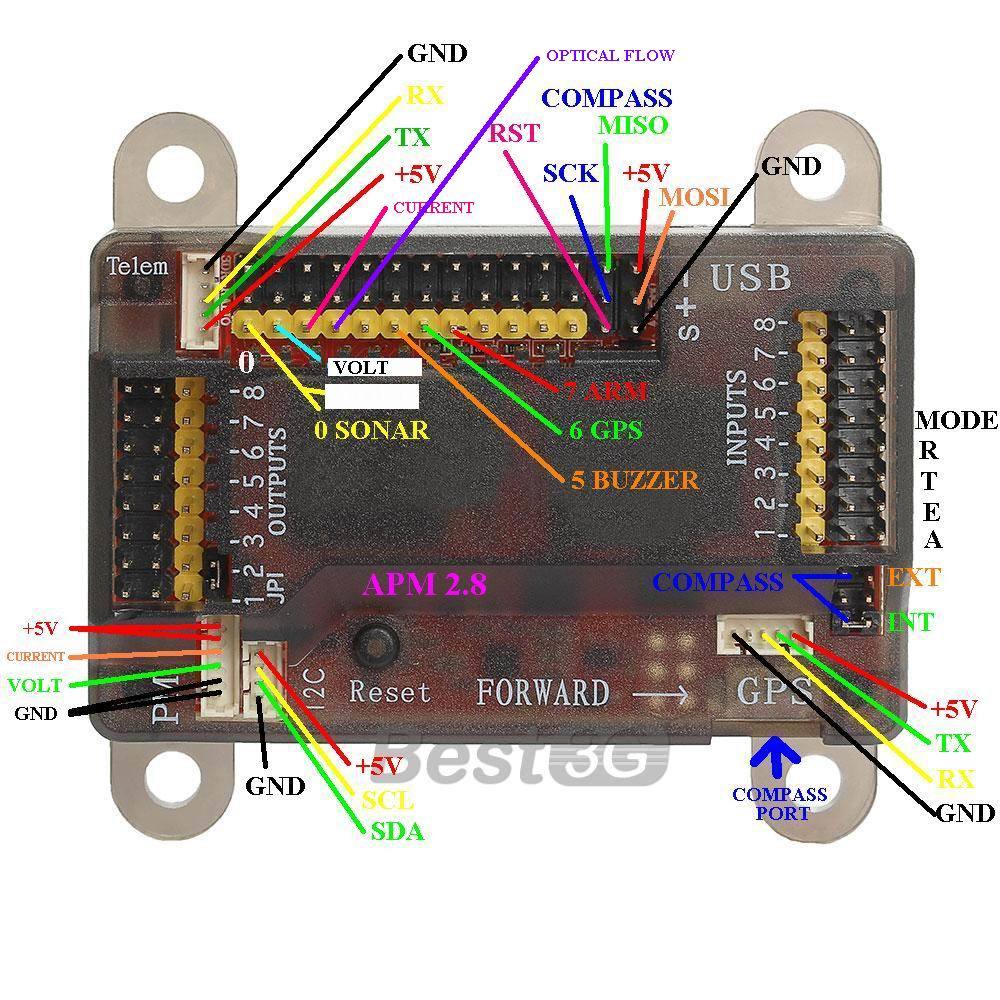
APM2 beeper v3.2.1 FW Copter 3.2 ArduPilot Discourse 
Flight Controller PDF Compass Flight Controller 
QAV250 Loiter Tuning Revisited Tips for Tuning 250 Size Frames 
Loiter Mode Copter documentation 
Loiter Mode Copter documentation 
APM 2.5 In Flight Pitch Roll Gain Tuning for Stabilize Mode w TBS Discovery Quadcopter 
Advanced Tuning Copter documentation 
Loiter Mode is not working while everything else works great 
Testing APM Flight modes Stabilize Altitude hold Land Loiter 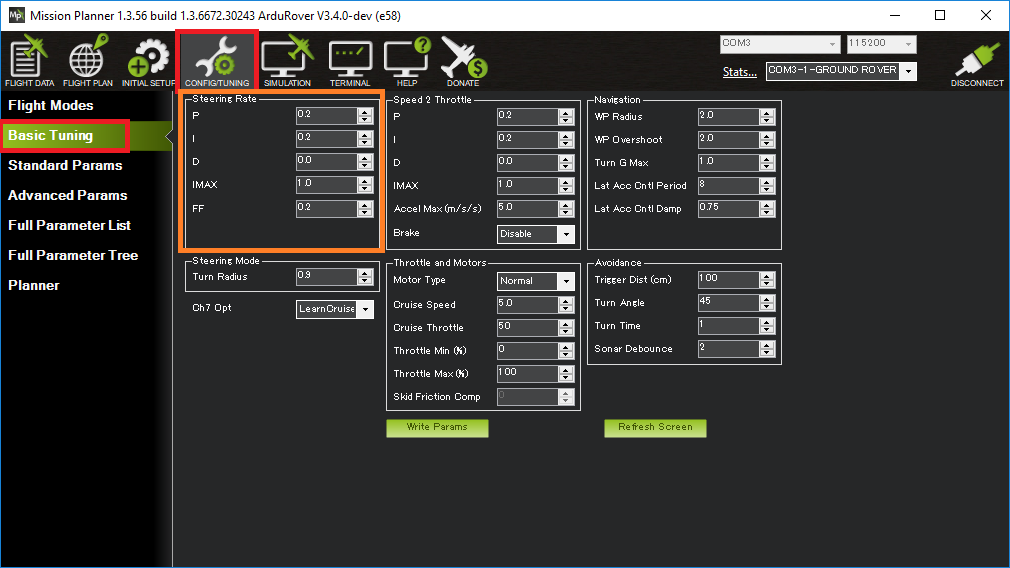
Tuning Turn Rate Rover documentation 
QAV250 Loiter Tuning Revisited Tips for Tuning 250 Size Frames with Pixfalcon APM Controllers 
Flight Controller PDF Compass Flight Controller 
PosHold Mode Copter documentation 
APM2.6 Ardupilot Flight Controller Review Oscar Liang 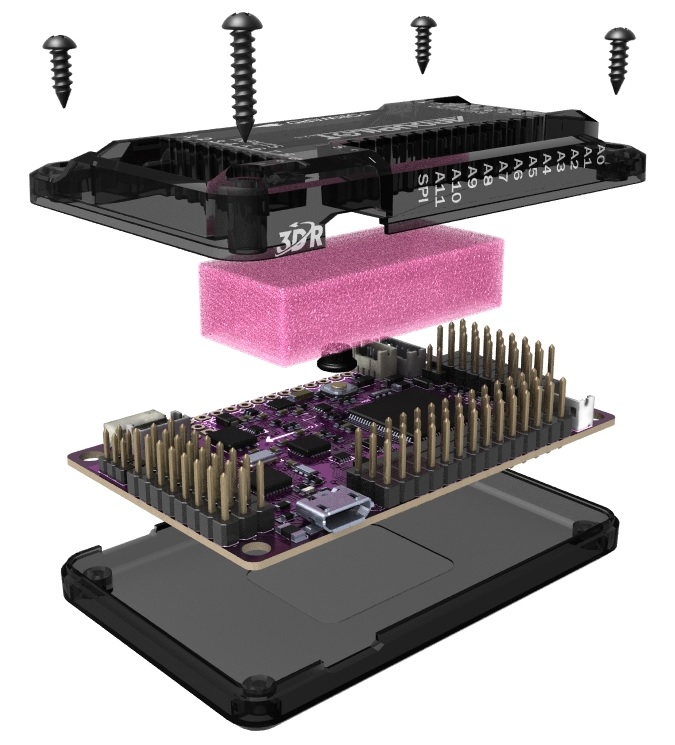
Archived APM 2.5 and 2.6 Overview Copter documentation 
PID setting airhigh 
APM 2.5 and ArduCopter 3.0.1 Loiter Setup and Backyard Test w DIY Mini Quadcopter 
APM 2.5 In Flight Pitch Roll Gain Tuning for Stabilize Mode w TBS 
APM 2.6 configuration step by step for fixed wing missing compass 
APM 2.5 In Flight Pitch Roll Gain Tuning for Stabilize Mode w TBS 
APM Pixhawk Tips for Good Loitering 
APM Copter Team 
PID setting airhigh 
PID setting airhigh 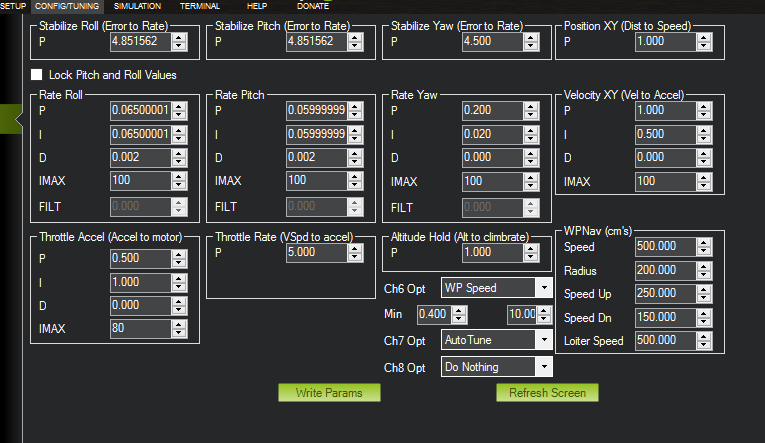
F450 Frame PID s and descent Copter 3.2 ArduPilot Discourse 
PID setting airhigh