Constant Yaw Rate Quadrotor 404warehouse
Apm set_throttle_out hot sale
Share.
Visit »
Ardupilot CSDN 
Apm Cxm all motors should move to ground idle 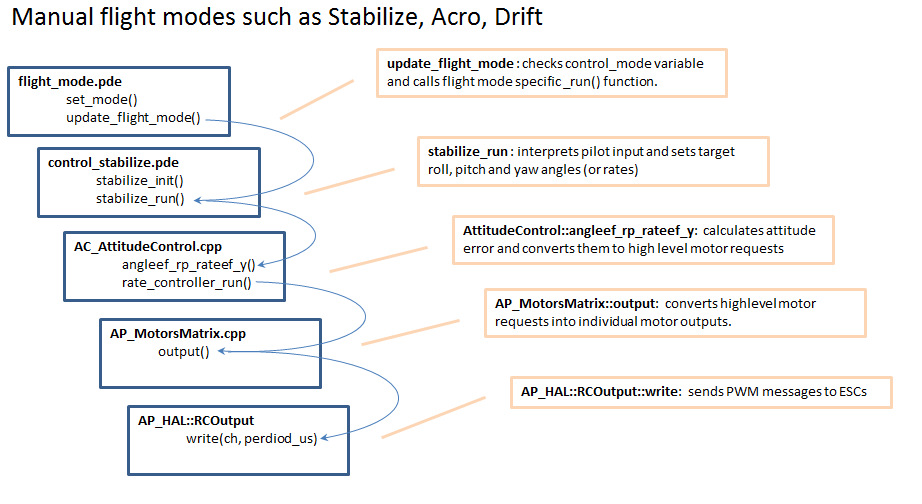
ArduPilot blog 
APM Libraries AC AttitudeControl Class Reference 
APM Libraries AC AttitudeControl Class Reference 
Repairing Faults in ArduPilot Kevin Angstadt Research 
APM Libraries libraries AP Math AP Math.h File Reference 
Repairing Faults in ArduPilot Kevin Angstadt Research 
Repairing Faults in ArduPilot Kevin Angstadt Research 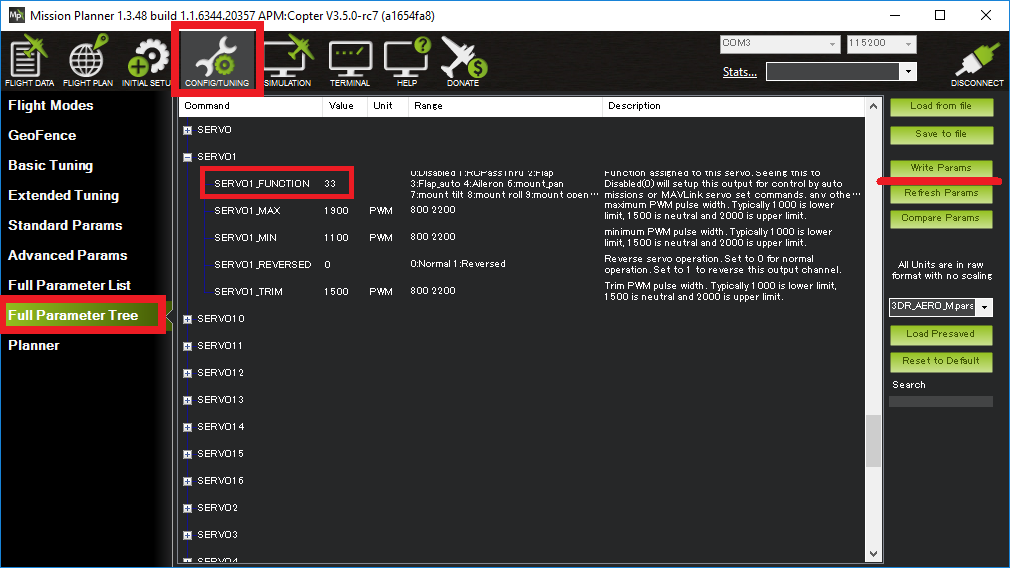
Autopilot Output Functions Copter documentation 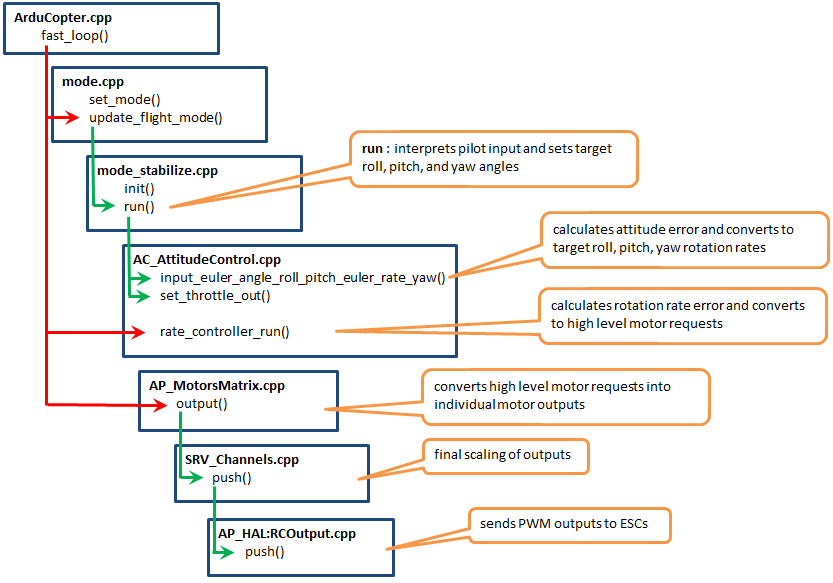
Copter Attitude Control Dev documentation 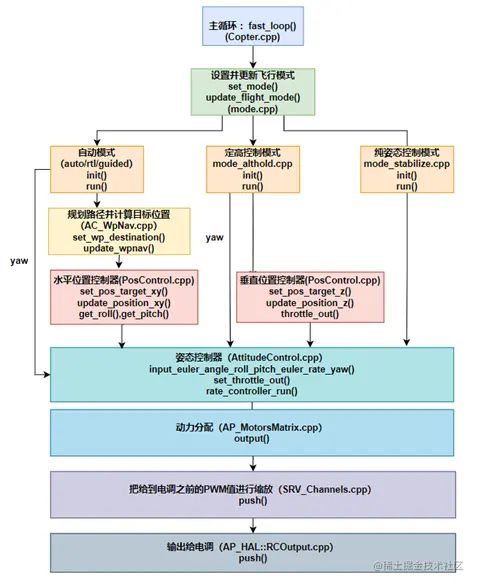
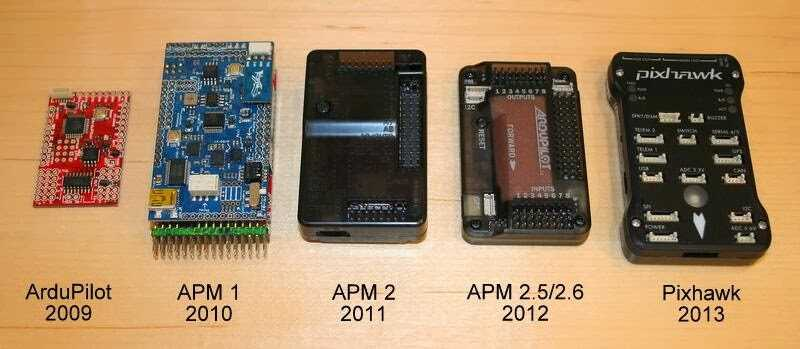
ArduPilot ArduPilot 
Repairing Faults in ArduPilot Kevin Angstadt Research 
Apm Cxm modefollow CSDN 
ArduPilot Mocap init xy controller CSDN 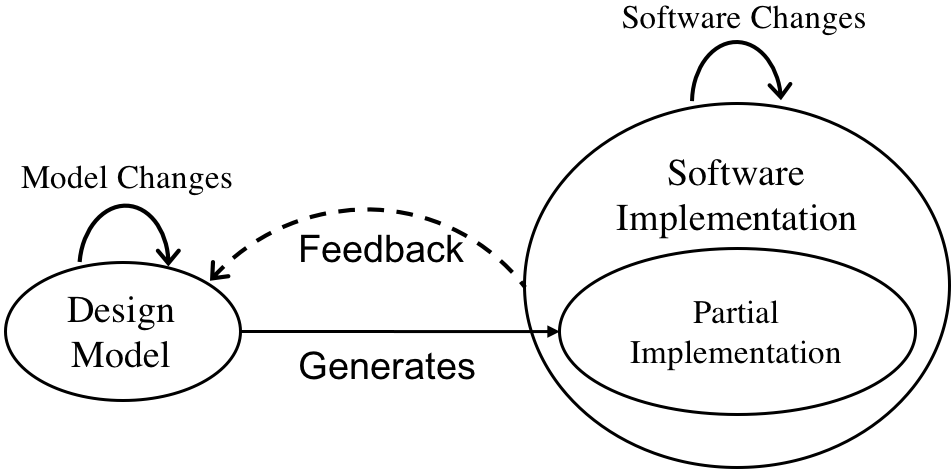
Controller Evolution A Software Perspective 
Apm Cxm all motors should move to ground idle 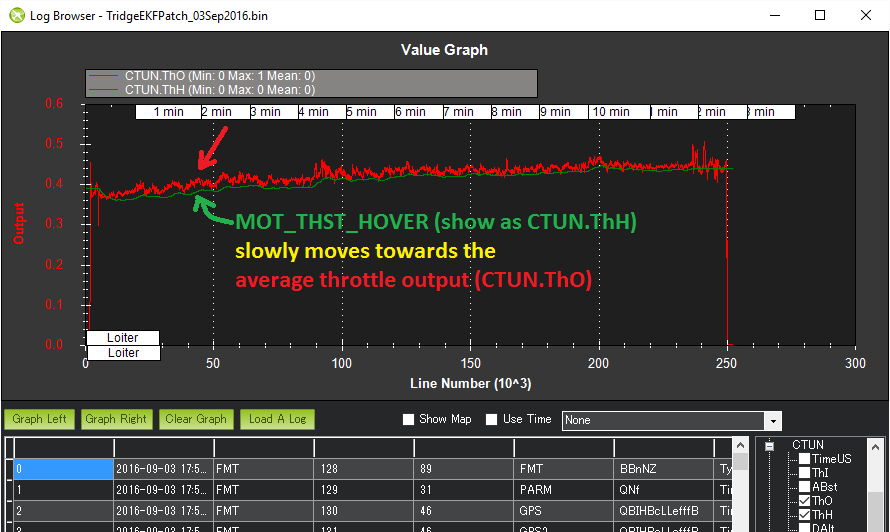
Setting Hover Throttle Copter documentation 
AC3.2rc2 Altitude loss after forward flight 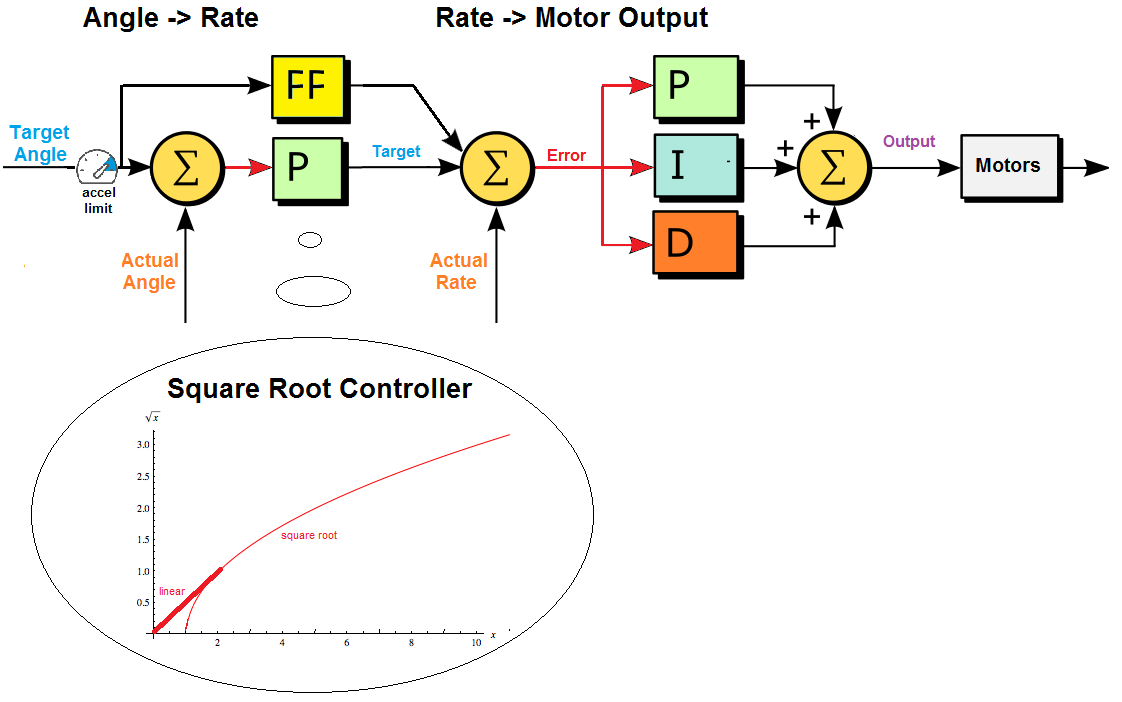
Copter Attitude Control Dev documentation 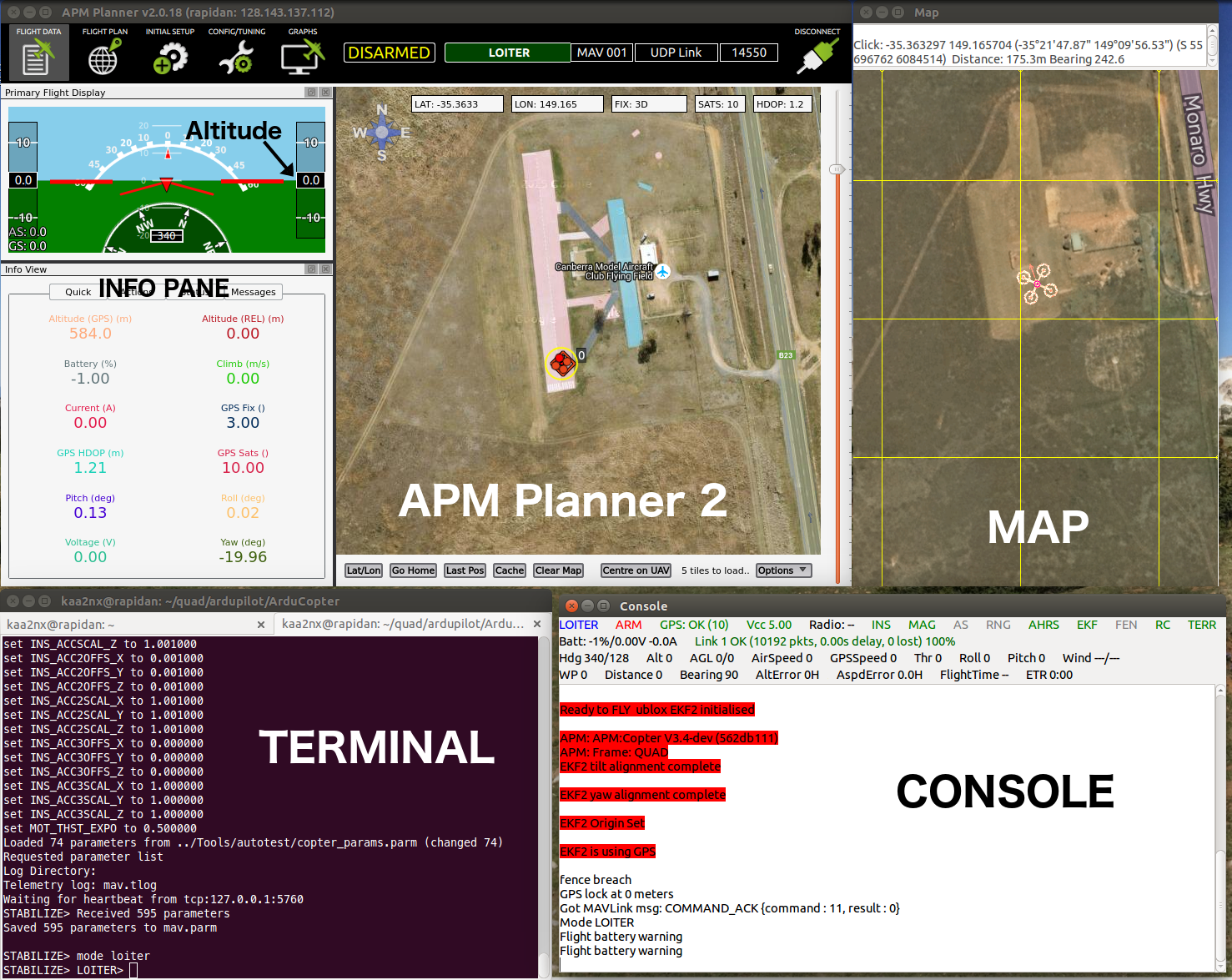
Repairing Faults in ArduPilot Kevin Angstadt Research 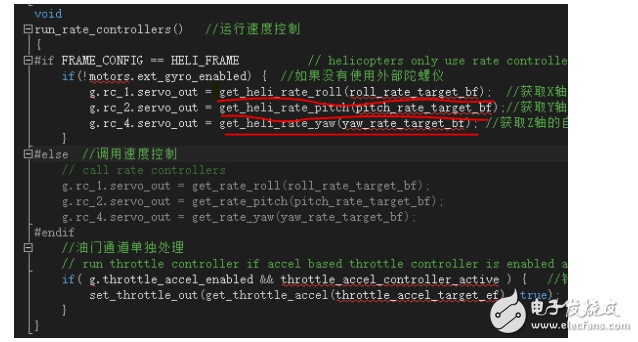
pid 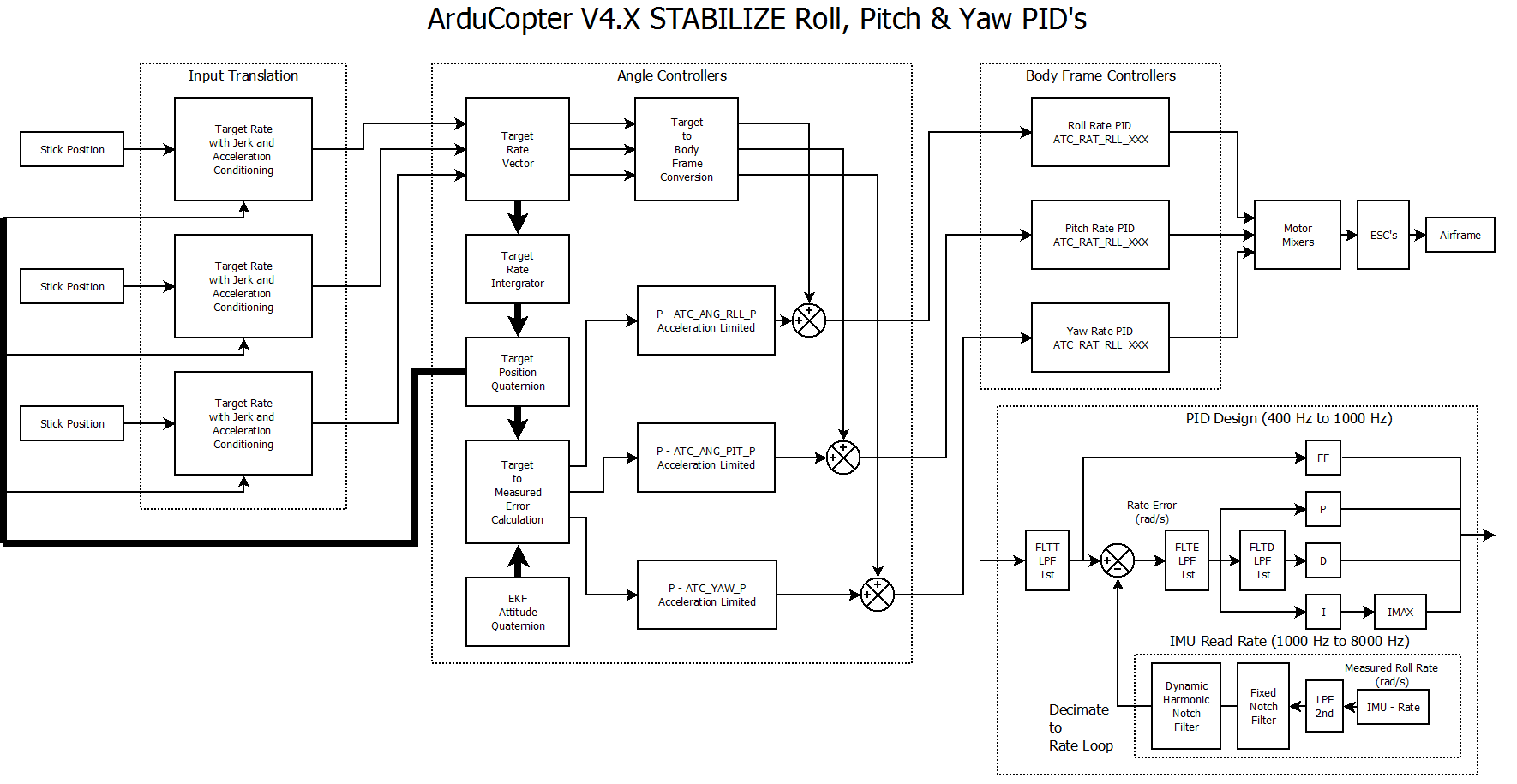
Copter Attitude Control Dev documentation 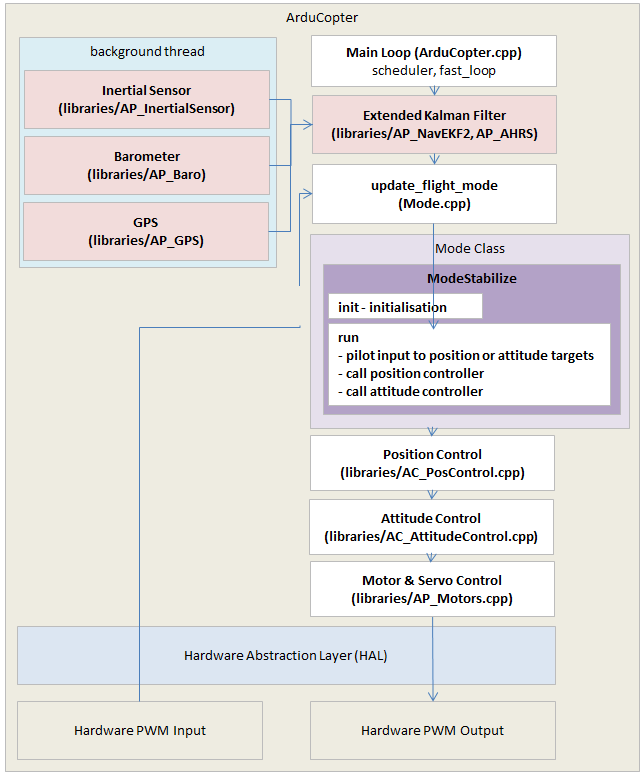
Adding a New Flight Mode to Copter Dev documentation 
AC3.2rc2 Altitude loss after forward flight 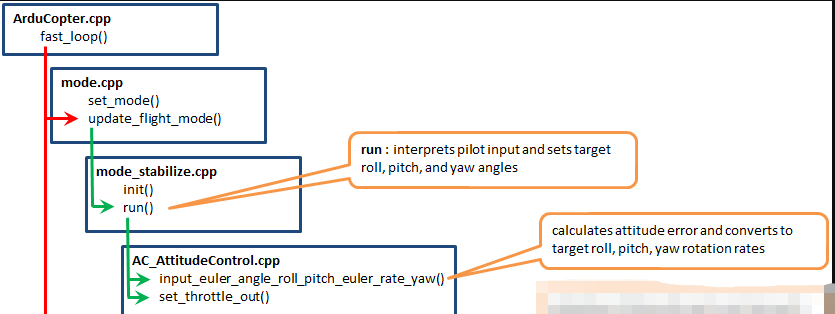
Ardupilot CSDN 
APM Libraries AC AttitudeControl Class Reference 
AC3.2rc2 Altitude loss after forward flight 
Auto takeoff Alt Hold with no GPS dependency 
Run rate controller at full gyro rate Issue 7613 ArduPilot 
Constant Yaw Rate Quadrotor 404warehouse 
ardupilot APM 
Copter Attitude Control Dev documentation 
Ardupilot 
Run rate controller at full gyro rate Issue 7613 ArduPilot 
AC3.2rc2 Altitude loss after forward flight 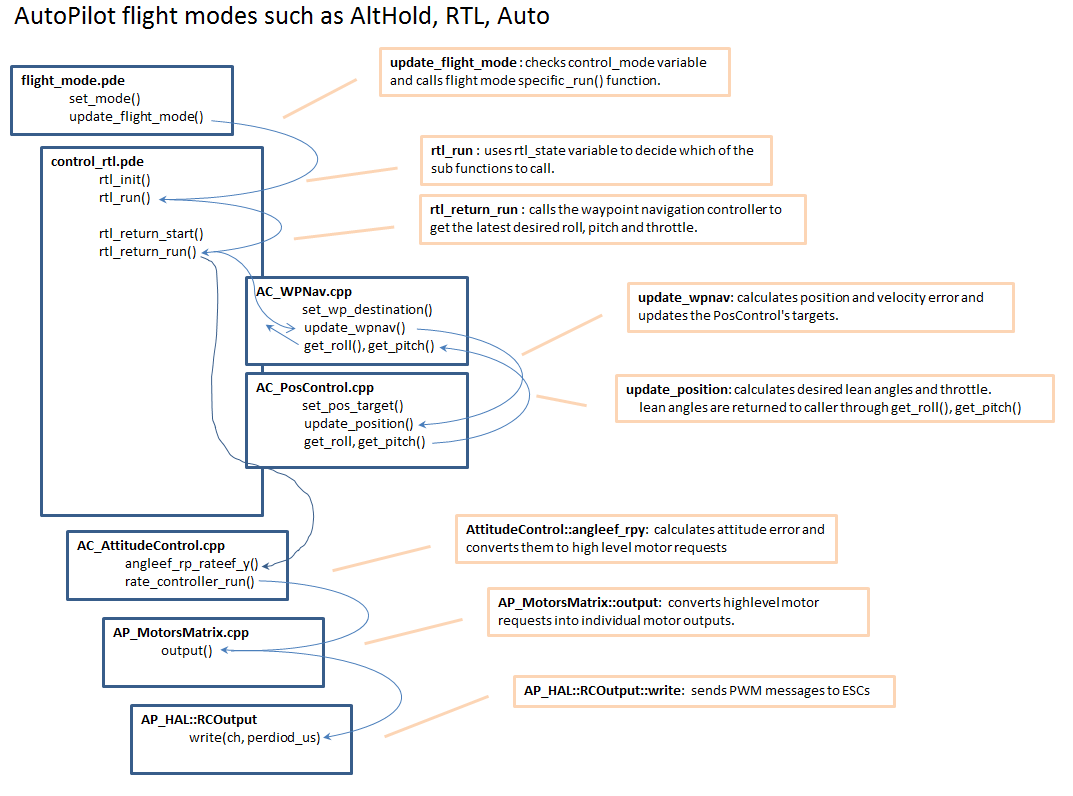
ArduPilot blog 
Apm Cxm modefollow CSDN 
APM Libraries AC AttitudeControl Class Reference
